
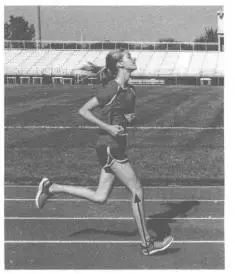
Når to objekter kolliderer, er resultatet rent fysisk. Dette gjelder enten det er et motorkjøretøy som kjører fort på en motorvei, en biljardkule som ruller langs et filtbord, eller en løper som kolliderer med bakken med en hastighet på 180 skritt i minuttet.
De spesifikke egenskapene til kontakten mellom bakken og løperens føtter bestemmer løperens løpehastighet, men de fleste løpere bruker sjelden tid på å studere sin «kollisjonsdynamikk». Løpere legger merke til sine ukentlige kilometer, langdistanse, løpehastighet, puls, strukturen på intervalltrening osv., men overser ofte det faktum at løpeevnen avhenger av kvaliteten på samspillet mellom løperen og bakken, og resultatene av all kontakt avhenger av vinkelen som objekter berører hverandre i. Folk forstår dette prinsippet når de spiller biljard, men de overser det ofte når de løper. De legger vanligvis ikke merke til vinklene som bena og føttene deres kommer i kontakt med bakken i, selv om noen vinkler er sterkt relatert til å maksimere fremdriftskraften og minimere risikoen for skade, mens andre genererer ekstra bremsekraft og øker muligheten for skade.
Folk løper i sin naturlige gange og tror bestemt at dette er den beste løpemåten. De fleste løpere legger ikke vekt på kraftpåføringspunktet når de er i kontakt med bakken (enten de skal berøre bakken med hælen, hele fotsålen eller forfoten). Selv om de velger feil kontaktpunkt som øker bremsekraften og risikoen for skade, genererer de fortsatt større kraft gjennom beina. Få løpere vurderer hardheten på beina når de berører bakken, selv om hardheten har en viktig innflytelse på støtkraftmønsteret. For eksempel, jo større stivheten i bakken er, desto større kraft overføres tilbake til løperens ben etter å ha blitt støtt. Jo større hardheten på beina er, desto større fremoverkraft genereres når løperen skyves mot bakken.
Ved å ta hensyn til elementer som bakkekontaktvinkelen på bein og føtter, kontaktpunktet og beina sine hardhet, blir kontaktsituasjonen mellom løperen og bakken forutsigbar og repeterbar. Dessuten, siden ingen løper (ikke engang Usain Bolt) kan bevege seg med lysets hastighet, gjelder Newtons bevegelseslover for resultatet av kontakten uavhengig av løperens treningsvolum, puls eller aerobe kapasitet.
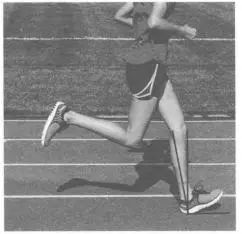
Fra et perspektiv på støtkraft og løpehastighet er Newtons tredje lov spesielt viktig: den forteller oss dette. Hvis en løpers ben er relativt rett når det berører bakken og foten er foran kroppen, vil denne foten berøre bakken fremover og nedover, mens bakken vil presse løperens ben og kropp oppover og bakover.
Akkurat som Newton sa: «Alle krefter har reaksjonskrefter av samme størrelsesorden, men i motsatt retning.» I dette tilfellet er reaksjonskraftens retning nøyaktig motsatt av bevegelsesretningen som løperen håper på. Med andre ord ønsker løperen å bevege seg fremover, men kraften som dannes etter å ha kommet i kontakt med bakken, vil presse ham opp og bakover (som vist i figuren nedenfor).
Når en løper berører bakken med hælen og foten er foran kroppen, er retningen på den første støtkraften (og den resulterende skyvekraften) oppover og bakover, noe som er langt fra løperens forventede bevegelsesretning.
Når en løper berører bakken i feil benvinkel, sier Newtons lov at kraften som genereres ikke må være optimal, og løperen kan aldri oppnå den raskeste løpehastigheten. Derfor er det nødvendig for løpere å lære å bruke riktig bakkekontaktvinkel, som er et grunnleggende element i riktig løpemønster.
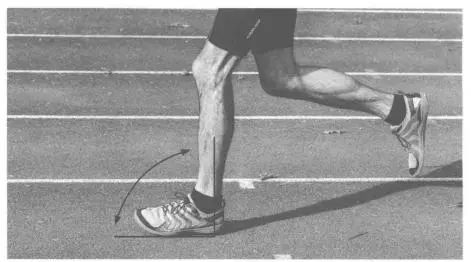
Den viktigste vinkelen i bakkekontakt kalles «tibialvinkelen», som bestemmes av graden av vinkelen som dannes mellom tibia og bakken når foten først berører bakken. Det nøyaktige tidspunktet for måling av tibiavinkelen er når foten først berører bakken. For å bestemme tibiavinkelen, bør en rett linje parallelt med tibia tegnes fra midten av kneleddet og ned til bakken. En annen linje starter fra kontaktpunktet til linjen parallelt med tibia med bakken og tegnes rett frem langs bakken. Trekk deretter 90 grader fra denne vinkelen for å få den faktiske tibiavinkelen, som er graden av vinkelen som dannes mellom tibia ved kontaktpunktet og den rette linjen vinkelrett på bakken.
Hvis for eksempel vinkelen mellom bakken og tibia når foten først berører bakken er 100 grader (som vist i figuren nedenfor), er den faktiske vinkelen til tibia 10 grader (100 grader minus 90 grader). Husk at tibiavinkelen faktisk er graden av vinkelen mellom en rett linje vinkelrett på bakken ved kontaktpunktet og tibia.
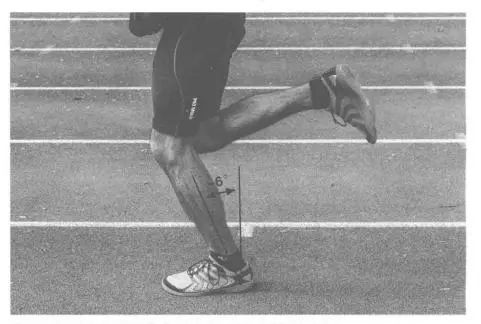
Tibiavinkelen er graden av vinkelen som dannes mellom tibia ved kontaktpunktet og den rette linjen vinkelrett på bakken. Tibiavinkelen kan være positiv, null eller negativ. Hvis tibia vipper fremover fra kneleddet når foten berører bakken, er tibiavinkelen positiv (som vist i figuren nedenfor).

Hvis tibia er nøyaktig vinkelrett på bakken når foten berører bakken, er tibialvinkelen null (som vist i figuren nedenfor).
Hvis tibia vipper forover fra kneleddet når den berører bakken, er tibialvinkelen positiv. Når den berører bakken, er tibialvinkelen -6 grader (84 grader minus 90 grader) (som vist i figuren nedenfor), og løperen kan falle forover når den berører bakken. Hvis tibia vipper bakover fra kneleddet når den berører bakken, er tibialvinkelen negativ.
Når det er sagt så mye, har du forstått elementene i løpemønsteret?
Publisert: 22. april 2025